キューブサットの概要
|
| No. |
外観 / 寸法 質量 |
名称 / 開発機関 / ミッション内容 |
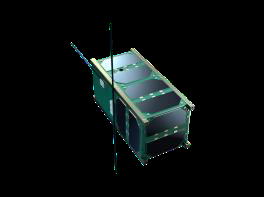
| 1 |
サイズ:約10×10×34cm
質量:約4kg
|
編隊飛行技術試験衛星(MAGNARO) / 名古屋大学 |
| 複数のキューブサット衛星によるコンステレーション・フォーメーションフライトをスラスタレスで達成することを目的として、軌道上で分離させた2 基のキューブサットにより
その技術の軌道上実証を行う。 |
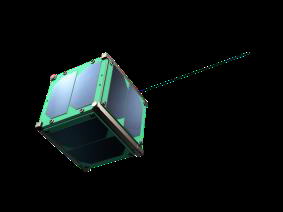
| 2 |
サイズ:約10×10×23cm
質量:約2kg
|
民生用デバイス利用実証衛星(MITSUBA) / 九州工業大学 |
| 民生用半導体の軌道上劣化観測による地上放射線試験の妥当性検証とUSB 汎用機器の宇宙利用実証を目的として、半導体素子の劣化観測とUSB 対応の小型スペクトルアナライザの軌道上実証を行う。 |
| 3 |
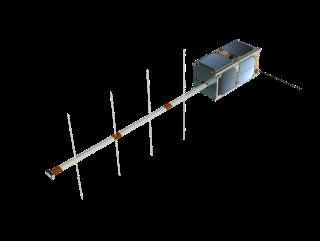
サイズ:約10×10×23cm
質量:約3kg
|
海洋観測データ収集IoT 技術実証衛星(KOSEN-2) / 米子工業高等専門学校 |
| キューブサットによる安価で効率的な海底地殻変動観測データ収集の技術実証を目的として、本衛星に搭載したLoRa 受信機と指向性アンテナを用いた通信実験を実施する。 |
| 4 |
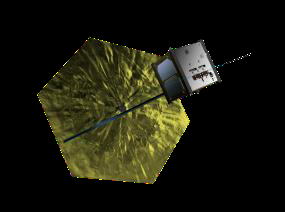
サイズ:約10×10×11cm
質量:約1kg
|
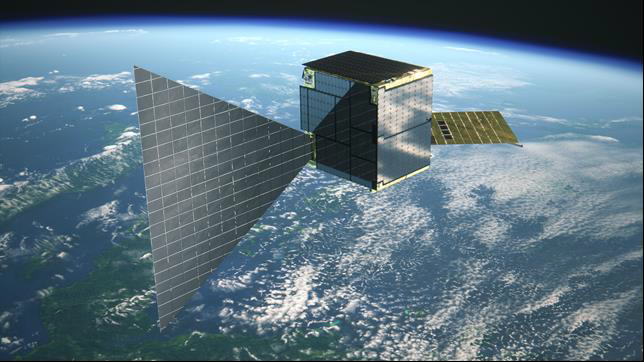
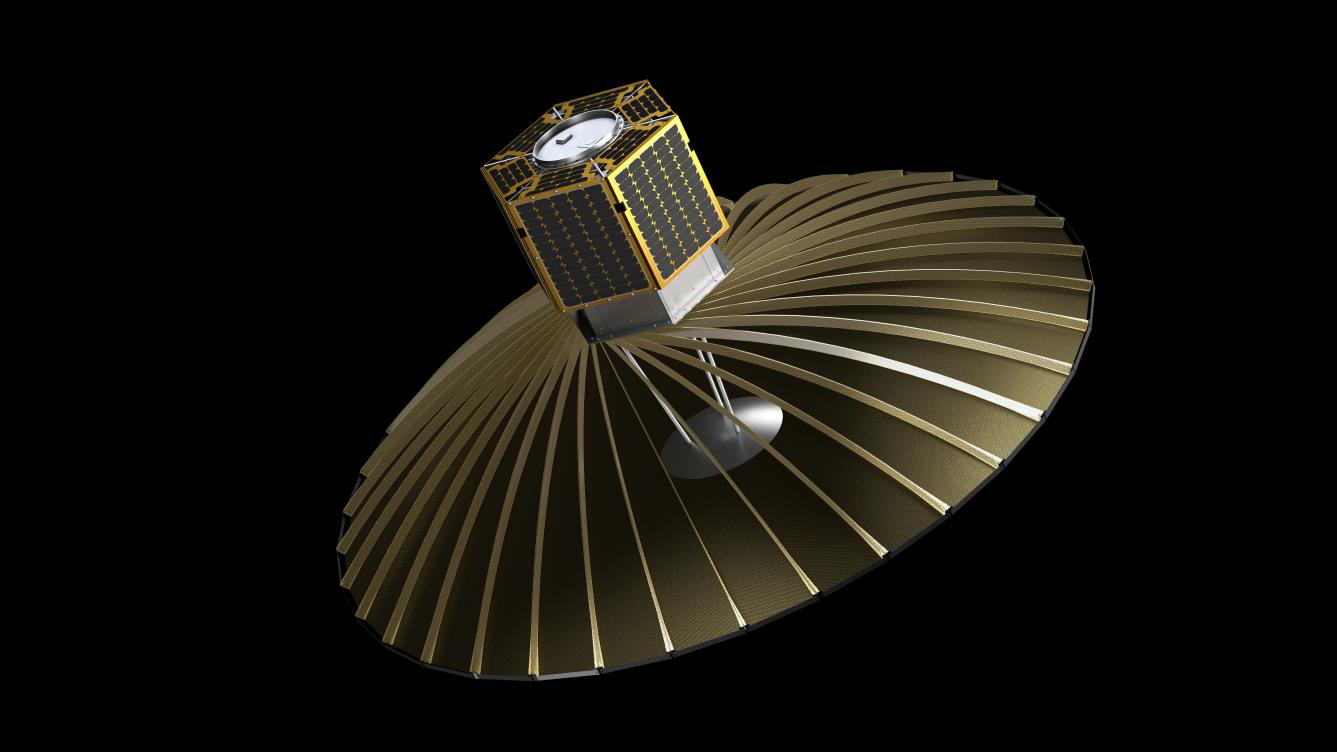
一体成型技術実証衛星(WASEDA-SAT-ZERO) / 早稲田大学 |
| 衛星構造の締結部の低減、衛星のデブリ化防止を目的として、金属積層法を用いた一体成型による衛星筐体の製造を行い、角柱多重らせん折り膜面を搭載して、軌道上での展開実験を実施する。 |
| 5 |
サイズ:約10×10×11cm
質量:約1kg
|
CubeSat 搭載用超小型マルチスペクトルカメラ実証衛星(FSI-SAT)
/ 一般財団法人未来科学研究所 |
| キューブサット用のマルチスペクトルカメラの製品化、バス機器のユニット化、レーザー通信技術の確立を目的として、マルチスペクトルカメラによる地球観測、赤外線リモコン方式のレーザーアップリンク実験を実施する。 |